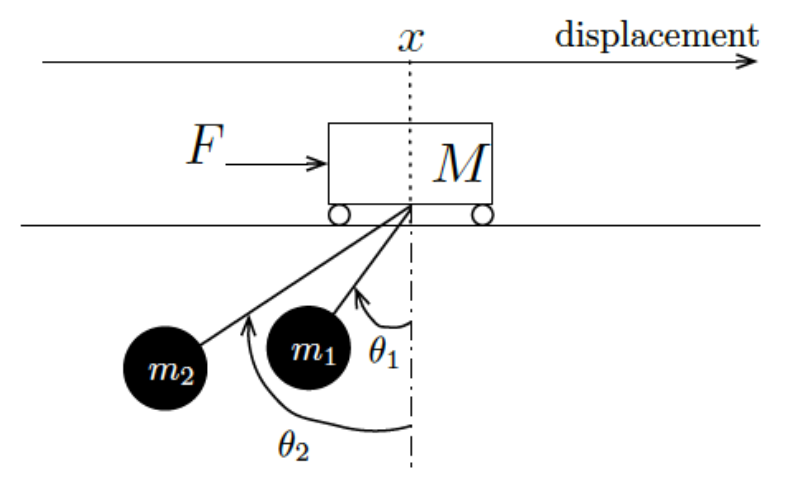
LQR and LQG controller Inverted pendulum on cart
- Derived Lagrangian equations for the Non – linear dynamic model of the system. Devised a Kalman Filter and chose gains based on performance.
- Simulated the behavior of the system with the LQR and LQG controller in Matlab